
Povzetek
Poškodba sprednje križne vezi kolena (ACL) je najpogostejša poškodba kolenskega sklepa pri športnikih, kot tudi nogometaših.
Biomehanika eno ali več let po ruptura ACL brez rekonstrukcije je pri športnikih slabo raziskana. Obstoječe raziskave so si enotne, da je ena od posledic totalne ruptura ACL povečana translacija tibije anteriorno.
Cilj pilotne študije je bil ugotoviti razlike v nekaterih biomehanskih parametrih med stabilnim in nestabilnim kolenom.
Pri običajni, samo-izbrani hitrosti hoje. Namen je pridobiti vpogled v možne kompenzatorne strategije.
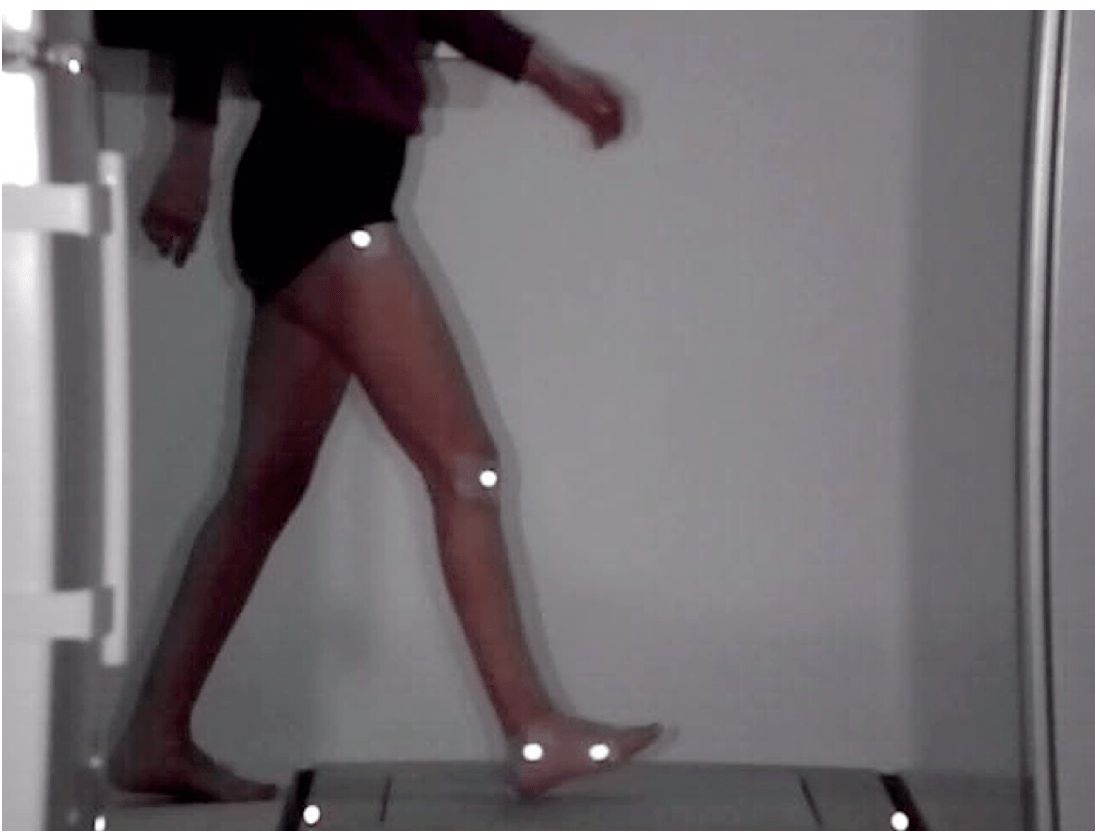
Z visokofrekvenčno kamero (120 Hz) in reflektivnimi markerji na spodnjih okončinah smo posneli 10 korakov v fazi opore;
pri preiskovanki (starost: 39 let, telesna višina: 158,5 cm, telesna masa: 45,0 kg);
s totalno ruptura ACL (mehansko nestabilno, a funkcionalno stabilno koleno), 3 leta po poškodbi.
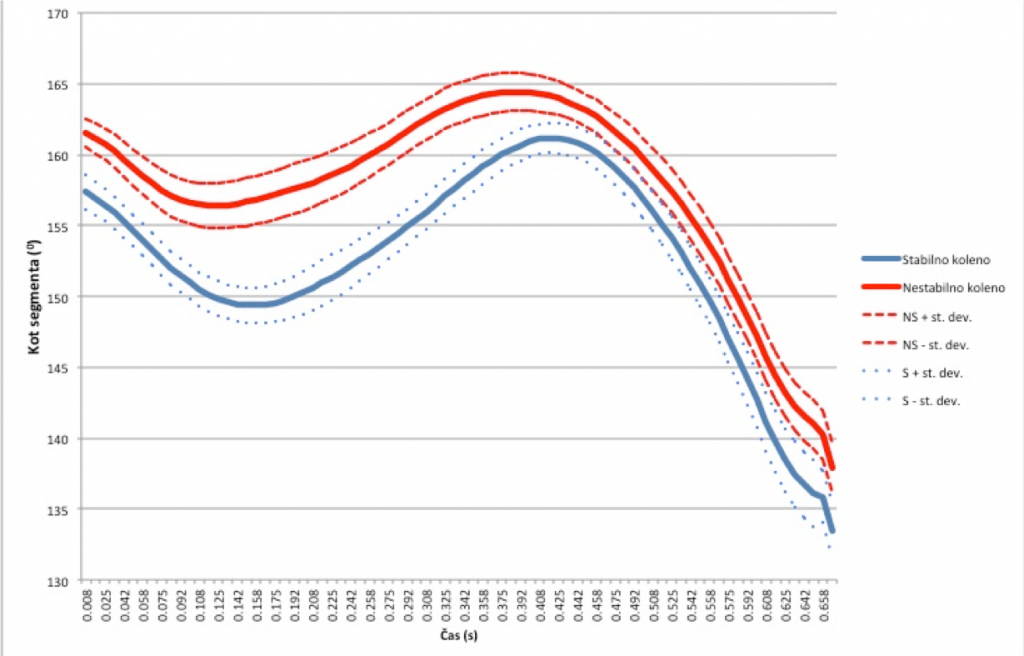
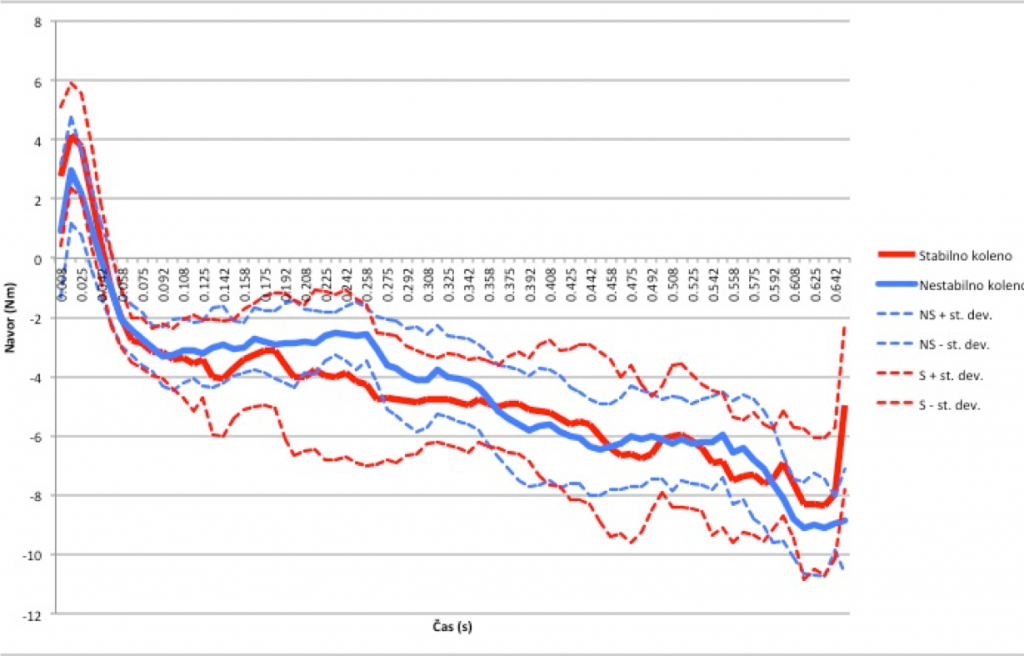
S pomočjo kinematične analize smo spremljali kot levega in desnega kolena. Obenem smo s pritiskovno ploščo izmerili reakcijske sile podlage. S pomočjo inverzne dinamike smo izračunali povprečen neto mišični navor obeh kolen. S pomočjo T-testa za neodvisne vzorce oz. Mann-Whitney U testa smo ugotovili značilno (p=0,000) večji kot ekstenzije nestabilnega kolena. Neto mišični navor se ni razlikoval med stabilnim in nestabilnim kolenom. Znano je, da totalna ruptura ACL vodi v razvoj prezgodnje artroze kolenskega sklepa.
Pričakovali bi, da je neto mišični navor tisti, ki povzroča prezgodnjo obrabo hrustanca. Kot kažejo rezultati te pilotne študije, obremenitve na mehansko nestabilno koleno niso povečane. Povečan navor verjetno ni tisti, ki bi bil primarno odgovoren za razvoj prezgodnje artroze. Večjo težo nosi spremenjena trenutna os vrtenja v kolenu, ki je posledica povečanega kota ekstenzije.
Uporaba fizioterapevtske tehnike manualne kinematične reedukacije bi lahko omogočila zmanjšanje ekstenzije v kolenu. S tem bi vplivala na enakomernejšo obremenitev hrustanca pri osebah, ki se zdravijo konzervativno.
Totalna poškodba sprednje križne vezi kolena (ACL) tudi po 3 letih po poškodbi vpliva na biomehaniko nestabilnega kolena med hojo. Večina športnikov se zaradi velike možnosti ponovne poškodbe kolena, ki vodi v lezijo meniskusa, odloči za rekonstrukcijo ACL.
Za tiste, ki se zdravijo konzervativno pa bi veljalo podrobneje raziskati vpliv manualne kinematične reedukacije na biomehaniko kolena. Morebitne razlike v mišični aktivaciji med mehansko stabilnim in nestabilnim kolenom, ki bi lahko bila razlog za povečan ekstenzijski kot.
Uvod
Najpogostejša poškodba kolenskega sklepa je ruptura ACL sprednje križne vezi (Garrett, 2000). Obstajata 2 mehanizma ruptura ACL. Najpogostejši mehanizem poškodbe je rotacija zgornjega dela telesa okoli fiksne goleni – fleksija, addukcija in zunanja rotacija tibije; drug mehanizem je hiperekstenzijska travma (Hewett idr., 2010). ACL je sestavljena iz 3 snopov (anteromedialni, intermedialni in posterolateralni snop).
Skupaj z ostalimi ligamenti in sklepno ovojnico vodijo intra-artikularno gibanje sklepnih površin. In to tako, da se povečuje napetost posameznih snopov vezivnih vlaken.
Intraartikularno se do 20° fleksije femur samo kotali in sicer se medialni condil 1. zaradi bolj okrogle oblike in 2. zaradi višje medialne intercondilarne eminence, kotali hitreje kot lateralni condil;
ko se fleksija povečuje se kotaljenju pridruži še translacijsko gibanje; posledica je pridružena zunanja rotacija femurja fleksiji (Kapandji, 1980). Med ekstenzijo se dogaja ravno nasprotno. ACL ima pomembno vlogo in sicer vodi zunanjo rotacijo tibije med ekstenzijo (de Bruijn, 2000). Glede na mehanizem poškodbe, so lahko poškodovani različni snopi ACL. Ena izmed funkcij ACL je zaustavljanje anteriorne translacije tibije. Raziskave ugotavljajo povečano translacijo tibije anteriorno pri ruptura ACL (Kozanek idr., 2009; Kvist in Gillquist, 2001; Zhang idr., 2003).
Obstaja več kliničnih testov za preverjanje funkcije ACL. Najpogostejše uporabljena sta Anteriorni predalčni test in Lachman test. Z njima ocenjujemo količino anteriornega zdrsa tibije in končni občutek (Draper in Schulthies, 1995). Glede na velikost zdrsa tibije anteriorno ločimo 3 stopnje nestabilnosti: +, ++ in +++.
Funkcionalna zmožnost kolena (obseg gibljivosti, mišična moč in koordinacija) značilno vplivajo na kinematiko in dinamiko hoje, bolj kot starost, spol in diagnoza (Stauffer idr., 1977). Ni jasno zakaj nekatere osebe z ruptura ACL dosežejo funkcionalno stabilno koleno, kljub mehanski nestabilnosti, medtem ko imajo drugi funkcionalno nestabilno koleno že pri opravljanju dnevnih aktivnosti.
Viri opisujejo prve kot »copers – coping with persistent pain« in druge kot »non-copers – non coping with persistent pain« (Rudolph idr., 1998; Eastlack idr., 1999; Kaplan, 2011). Pred poškodbo ACL se »copers« in »non-copers« med sabo ne razlikujejo, »copers« imajo enako ali večjo nestabilnost v kolenu kot »non-copers« (Eastlack idr., 1999), podobno kinematiko kot na kontralateralnem kolenu in kot nepoškodovane osebe, medtem ko uporabljajo »non-copers« neuspešne strategije s povečanimi kokontrakcijami, ki funkcionalno ne povečajo stabilnosti kolena, ampak vodijo v prekomerne kompresijske sile v kolenu, ki lahko poškodujejo sklepni hrustanec in meniskus (Rudolph idr., 1998).
Cilji in namen
V naši pilotski raziskavi smo se odločili, da preverimo kinematične in dinamične parametre med hojo pri nestabilnem kolenu +++, zaradi totalne rupture ACL.
Pri nepoškodovanih osebah so ugotovili, da ni razlike v kinematičnih in dinamičnih parametrih v kolenskem sklepu med dominantno in nedominantno nogo (van den Harst idr., 2007), zato lahko primerjamo poškodovano koleno z kontralateralnim kolenom.
Zanimalo nas je povečana translacija tibije anteriorno povzroča posledično povečano ekstenzijo med hojo v nestabilnem kolenu. Preiskovanka ima funkcionalno stabilno koleno, zato jo lahko obravnavamo kot »copers«.
Zanimalo nas je, kakšne kompenzatorne strategije uporablja in preverili ali je zaradi spremenjene biomehanike nestabilnega kolena povečan navor v nestabilnem kolenu, ki bi še povečal obremenitev in kompresijske sile v kolenu ter posledično prezgodnji pojav sekundarne artroze.
Diskusija in zaključek
Posledica totalne ruptura ACL je nestabilnost kolena. Namen naše pilotske raziskave je ugotoviti, kakšni so prilagoditveni mehanizmi na poškodbo med hojo. Rezultati kažejo na značilno razliko v kotu med hojo in sicer na povečano ekstenzijo v nestabilnem kolenu. Navor v kolenskem sklepu se ni statistično značilno razlikoval v nestabilnem in stabilnem kolenu.
Rezultati naše pilotske raziskave so v skladu z raziskavami, ki so ugotovile manj fleksije v nestabilnem kolenu zaradi totalne ruptura ACL (di Stasi in Snyder-Mackler, 2012) in pri »copers« (Rudolph idr., 1998; Chiemlewski idr., 2001; Gardinier idr., 2012).
Pogosta dolgoročna komplikacija rupture ACL je prezgodnja sekundarna artroza kolena. Nepoškodovano koleno ima 2 trenutni kontaktni točki, kjer so največje obremenitve: na lateralnem in medialnem tibiofemoralnem delu. Lateralna kontaktna točka je 4 mm anteriorno od platoja tibije pri 0 ekstenzije in se med fleksijo v zaprti kinematični verigi premika posteriorno, medtem ko medialna kontaktna točka, ki leži v sredini platoja tibije, ostaja praktično nespremenjena (de Frate idr., 2004).
Obe kontaktni točki se nahajata na notranjem delu platoja tibije in femoralnih kondilov, v bližini tibialne intercondilarna eminence, ki ima pomembno vlogo pri stabilnosti (Li idr. 2005A).
Pri nepoškodovanem kolenu je hrustanec debelejši na mestu kontaktne točke (Li idr., 2005B; Binghman idr., 2008). Spremembe kinematike zaradi poškodbe ACL spremenijo kontaktne točke, ki se premaknejo posteriorno zaradi povečanega zdrsa tibije, in tudi lateralno (Li idr., 2006).
Ruptura ACL povzroči kaskado dogodkov, ki povzročijo nepravilne obremenitve sklepnega hrustanca (van de Velde idr. 2009), ki vodijo v razvoj prezgodnje sekundarne artroze.
Osebe s sekundarno artrozo kolena zaradi totalne rupture ACL pogosto razvijejo osteofite na femurju in tibiji v bližni tibalne eminence (Fairclough idr., 1990), zato je pomembno, da pri rekonstrukciji ACL poskušajo popraviti kontaktne točke sklepnega hrustanca ne samo v anteroposteriorni, ampak tudi mediolateralni smeri.
Poleg vodenja sklepnih površin ima ACL veliko proprioceptorjev: Pacinijevih in Ruffinijevih telesc, ki sodelujejo v senzoričnemu sistemu motorične kontrole.
Takoj ko naredimo anteriorno translacijo tibije pri Anteriornem predalčnem testu, se v trenutku poveča EMG aktivnost sinergistov ACL torej fleksorjev kolen, kot obrambni mehanizem pred preveliko translacijo (Grüber idr., 1986).
Z artrokinematičnimi mobilizacijami fizioterapevti vplivamo na intraartikularno gibanje in poskušamo vzpostaviti boljše razmerje med kotaljenjem in translacijo v sklepu. Vplivamo na trenutno os rotacije v sklepu in na kontaktne točke sklepnega hrustanca.
Pri fizioterapevtski tehniki manualna kinematična reedukacija vključimo aktivno osebo in se na ta način ne samo izboljšuje razmerje med kotaljenjem in translacijo v sklepu, ampak poteka tudi motoričnoučenje novega položaja sklepa oziroma novega giba (de Bruijn, 2000).
Pri osebah, ki se konzervativno zdravijo je priporočljiva manualna kinematčna reedukacija kot tehnika učenja motorične kontrole, da zmanjšajo ekstenzijo med hojo pri poškodovanem kolenu in na ta način morda izboljšajo položaj kontaktne točke in obremenitve sklepnega hrustanca vsaj v anteroposteriorni smeri. V naši raziskavi smo potrdili, da imajo “copers” enake navore v nestabilnem kot stabilnem sklepu (Eastlack idr., 1999).
Iz tega lahko sklepamo, da pri “copers” niso povečane obremenitve na nestabilno koleno tiste, ki so primarno odgovorne za razvoj prezgodnje sekundarne artroze, ampak da je pomembna os rotacije v sklepu, ki določa kateri del hrustanca je obremenjen v določenem obsegu giba.
V prihodnjih raziskavah bi bilo smiselno preveriti ali se sekundarne artroze pri “copers” in “non-copers” med seboj razlikujejo. “Non-copers” imajo poleg spremenjene osi rotacije še zaradi kokontrakcije povečane kompresijske sile v sklepu, ki zaradi nepravilne osi preobremenjujejo dele hrustanca, ki niso zgrajeni za take obremenitve.
V prihodnjih raziskavah bi bilo smiselno preveriti ali lahko z manualno kinematično reedukacijo kontroliramo kot v kolenu med hojo in ali lahko “pravilnejša” hoja postane avtomatizirana.
Poškodba sprednje križne vezi kolena – Metode
Merjenka
V raziskavi je prostovoljno sodelovala 1 preiskovanka (starost 39 let, telesna višina 158,5 cm, telesna masa 45 kg, indeks telesne mase 18 kg/m2). Preiskovanka je bila brez akutnih bolečin in izliva v kolenu, s potrjeno diagnozo na MRI totalna ruptura ACL in klinično nestabilnim kolenom +++ .
Predhodno je bila seznanjena z nevšečnostmi in dobrobitmi raziskave, ki je bila izvedena v okviru vaj pri predmetu Analiza gibanja v okviru magistrskega študija na Univerzi na Primorskem, Aplikativna kineziologija.

Potek in organizacija meritev
Priprava markerjev
Za merjenje kotov v kolenu smo izbrali metodo snemanja z visokofrekvenčno videokamero in kontrastnimi markerji. Kontrastni markerji so samolepljivi, okrogle oblike s premerom 4 cm.
Za opazovanje spreminjanja kota v kolenu med hojo smo potrebovali tudi podatke za spreminjanje kota v gležnju. Predpostavljali smo, da interphalangealni, metatarsophalangealni, tarsometatarsalni, proksimalni tarsalni in talocalcaneonavicularni sklep predstavljajo enoto, ki jo predstavlja prvi marker.
Prvi marker smo prilepili na bazo phalange mezinca na spodnji okončini.
Drugi marker smo prilepili na lateralni malleolus fibule. Os gibanja talocruralnega sklepa, ki ga predstavlja drugi marker je sicer bolj kavdalno, a smo se zaradi praktičnih razlogov kljub temu odločili za ta približek.
Tretji marker smo prilepili na lateralni condill femurja. Os gibanja femurotibialnega sklepa je sicer malo kavdalno, a smo se zaradi praktičnih razlogov odločili za ta približek, saj bi se marker med hojo hitro odlepil, če bi bil na sklepni špranji tibiofemuralnega sklepa. Tretji marker predstavlja os rotacije tibiofemuralnega sklepa = kolenskega sklepa.
Četrti marker smo prilepili na trochanter major femurja. Os rotacije kolčnega gibanja je precej bolj kranialno, kar pa v našem primeru niti ni tako pomembno, saj nam marker predstavlja samo proksimalno točko na femurju.
Pritiskovna plošča
V dolžini 10 m smo zaporedno postavili več podestov, ki so dvignili nivo tal do enake višine kot je pritiskovna plošča (HE 600600-2K, AMTI Force and motion, Watertown, Massachusetts, ZDA), ki je bila v sredini. Pritiskovna plošča je bila obrnjena tako, da je bila x os pritiskovne plošče v enaki smeri kot x os na kameri. Pritiskovna plošča je imela v vsakem vogalu senzor, ki je s pomočjo deformacije uporovnih lističev meril silo s frekvenco 1200/s. Rezultate smo zajemali s pomočjo programske opreme AviMes.
Snemanje z visokofrekvenčno kamero in zajem podatkov
Preiskovanka je 6 minut hodila z lastno izbrano frekvenco hoje, da je bilo gibanje enakomerno, koordinirano in čim bolj spontano. Nato je hodila z enako frekvenco po podestu in pritiskovni plošči 10 krat.
Snemali smo z visoko frekvenčno videokamero (FINEPIX HS10, Fujifilm corporation) z razdalje 5 m in frekvenco 120/s. Za dobro osvetlitev markerjev smo uporabili reflektorje (VIP PRO-LIGHT, Lowel lights, inc., New York, ZDA). Tako smo zajeli 10 posnetkov stabilnega kolena.
Za 10 posnetkov nestabilnega kolena je zaradi prostorskih omejitev hodila v drugo smer, zato smo obrnili pritiskovno ploščo tako, da je bila x os na kameri enko obrnjena kot x os na pritiskovni plošči. Dobljene posnetke smo s pomočjo programske opreme za analizo slike (BINK VIDEO – RAD CONVERTER, RAD Game Tools, Inc., Washington, USA in AviMes) primerno obdelali in pripravili za nadaljne analize.
Usklajevanje videoposnetka in pritiskovne plošče
Izbrali smo 20 posnetih čimbolj podobno trajajočih korakov, kjer je preiskovanka stopila s celim stopalom na približno sredino pritiskovne plošče. 10 posnetkov in meritev pritiskovne plošče za stabilno koleno in 10 posnetkov ter meritev za nestabilno koleno. Na osnovi vidne ocene smo pri vseh izbranih posnetkih poskusili na enak način določiti začetek faze dostopa in konec faze odriva posameznega koraka.
Poškodba sprednje križne vezi kolena – Spremenljivke
Izbrali smo 10 korakov za stabilno koleno in 10 korakov za nestabilno koleno. Za vsak korak smo določili začetek faze dostopa čas T0 in konec faze odriva čas Tn. Začetek faze opore na pritiskovni plošči smo določili čas T0 in konec faze odriva čas Tn. Na pritiskovni plošči smo zajemali podatke s frekvenco 1200/s, na visokofrekvenčni kameri s frekvenco 120/s. T0 na začetku faze dostopa na posnetku smo izenačili s T0 na začetku faze opore na pritiskovni plošči. Konec faze odriva na posnetku Tn smo izenačili s koncem faze odriva Tn na pritiskovni plošči.
Iz podatkov pritiskovne plošče smo izločili odvečne podatke tako, da smo izbrali samo tiste podatke, ko je bil čas na pritiskovni plošči enak času na videoposnetku.
Videoposnetek smo s pomočjo programske opreme VIRTUAL DUB obrezali in stisnili s kodekom indeo&video 5.10, 95% kvaliteta. S pomočjo programske opreme NOTEPAD smo programirali verigo markerjev, ki jih je programska oprema AVI MES prepoznala.
Tako smo dobili za vsak marker surove podatke v koordinatnem sistemu (x,y) v času od T0 do Tnin v cm. Surove podatke smo filtrirali s kritično glajenim filtrom, ki prepušča nizke frekvence in odstranjuje šum. Izbrali smo »cut off« frekvenco 10/s. Ker so se filtrirani podatki zamaknili v desno, smo z enako frekvenco 10/s ponovno filtrirali podatke, le v obratni smeri: od zadnjega do prvega podatka. Tako so se podatki zamaknili v levo in ni več faznega zamika. Podatke smo spremenili iz centimetrov v metre.
Razlika X vrednosti tretjega markerja, ki predstavlja kolenski sklep in X vrednosti drugega markerja (v istem času), ki predstavlja talocruralni sklep je X koordinata vektorja a (Enačba 1). Razlika Y vrednosti tretjega markerja, ki predstavlja kolenski sklep in Y vrednosti drugega markerja (v istem času), ki predstavlja talocruralni sklep – gleženj, je Y koordinata vektorja a (Enačba 2).
Tako izračunamo koordinate vektorja a (ax,ay). Ko izračunamo koordinate vektorja a, nas zanima njegova dolžina. Dolžina vektorja je enaka korenu vsote kvadratov koordinat vektorja (Enačba 3). Nato izračunamo kot med enotskim vektorjem e (1,0) in vektorjem a (ax,ay) s pomočjo skalarnega produkta vektorja e in vektorja a. Količnik med ax in dolžino vektorja a je enak cos α (Enačba 4).
Razlika X vrednosti četrtega markerja, ki predstavlja kolčni sklep in X vrednosti tretjega markerja (v istem času), ki predstavlja kolenski sklep je X koordinata vektorja b (Enačba 5). Razlika Y vrednosti četrtega markerja, ki predstavlja kolčni sklep in Y vrednosti tretjega markerja (v istem času), ki predstavlja kolenski sklep, je Y koordinata vektorja b (Enačba 6). Tako izračunamo koordinate vektorja b (bx,by).
Nato izračunamo dolžino vektorja, ki je enaka korenu vsote kvadratov koordinat vektorja (Enačba 7). Sledi izračun kota med enotskim vektorjem f (-1,0) in vektorjem b (bx,by) s pomočjo skalarnega produkta vektorja f in vektorja b. Količnik med bx in dolžino vektorja b je enak cos β (Enačba 8). Vsota kotov α in β je kot v kolenu φ v radianih. Če kot v radianih pomnožimo s količnikom med 180° in π (≈3,14) dobimo kot v kolenu izražen v stopinjah (Enačba 9).
Ker je bil čas trajanja posameznega koraka zelo podoben, smo lahko računali povprečje 10 korakov stabilnega kolena za vsako sličico v videoposnetku. Najprej izračunamo povprečje v času T0(Enačba 10), nato v času T1 (Enačba 11) in tako naprej do časa Tn (Enačba 12).
Enak postopek ponovimo za računanje povprečja kota v kolenu 10 korakov nestabilnega kolena v času T0 (Enačba 10), nato v času T1(Enačba 11) in tako naprej do časa Tn (Enačba 12).
Za računanje navora v kolenu potrebujemo časovno usklajene podatke iz pritiskovne plošče v času od T0 do časa Tn: Fx in Fy , ki jo izračunamo kot vsoto Fz1, Fz2, Fz3 in Fz4 (Enačba 13) za vsak korak posebej.
Razlika X vrednosti drugega markerja, ki predstavlja gleženj in X vrednosti prvega markerja (v istem času), ki predstavlja phalange prstov je X koordinata vektorja c (Enačba 14). Razlika Y vrednosti drugega markerja, ki predstavlja gleženj in Y vrednosti prvega markerja (v istem času), ki predstavlja phalange prstov, je Y koordinata vektorja c (Enačba 15). Tako izračunamo koordinate vektorja c (cx,cy). Dolžina vektorja je enaka korenu vsote kvadratov koordinat vektorja (Enačba 16).
Izračunamo kot med enotskim vektorjem e (1,0) in vektorjem c (cx,cy) s pomočjo skalarnega produkta vektorja e in vektorja c. Količnik med cx in dolžino vektorja c je enak cos δ (Enačba 17).
Zmnožek razlike zaporednih kotov γ s frekvenco zajema je kotna hitrost segmenta (Enačba 18). Zmnožek razlike zaporednih kotnih hitrosti segmenta je kotni pospešek segmenta (Enačba 19).
Zmnožek skupne mase telesa, koeficienta mase segmenta, kvadrata dolžine segmenta in kvadrata distalnega koeficienta dolžine je vztrajnostni moment segmenta (Enačba 20). Izračunamo težišče segmenta (xT, yT) tako, da seštejemo x vrednosti prvega markerja in zmnožek razlike x vrednosti drugega markerja in x vrednosti prvega markerja ter koeficient dolžine segmentov (Enačba 21).
Enak postopek ponovimo za y vrednosti (Enačba 22). Zmnožek razlike zaporednih x koordinat težišča segmenta in frekvence je x koordinata vektorja hitrosti (Enačba 23). Enak postopek ponovimo za y vrednosti (Enačba 24). Zmnožek razlike zaporednih x koordinat hitrosti segmenta in frekvence je x koordinata pospeška hitrosti (Enačba 25). Enak postopek ponovimo za y vrednosti (Enačba 26).
Sedaj lahko izračunamo x koordinato sile, s katero deluje golen na stopalo, ki je vsota sile podlage in zmnožka mase telesa, koeficienta mase segmentov in pospeška segmenta (Enačba 27). Enak postopek ponovimo za y vrednosti (Enačba 28).
Navor v gležnju lahko izračunamo kot vsoto zmnožka vztrajnostnega momenta in kotnega pospeška segmenta, navora sile podlage v x smeri, navora sile podlage v y smeri, navora sile goleni na stopalo v x smeri in navora sile goleni na stopalo v y smeri (Enačba 29). Ročice izračunamo kot dolžino vektorja od težišča segmenta do oprijemališča sile, ki proizvaja navor. Izračunamo kotno hitrost goleni iz zaporednih vrednosti kota α (Enačb 1 do 4 in Enačba 18), kotni pospešek goleni (Enačba 19), vztrajnostni moment goleni (Enačba 20).
Izračunamo težišče segmenta (xT, yT) tako, da seštejemo x vrednosti drugega markerja in zmnožek razlike x vrednosti tretjega markerja in x vrednosti drugega markerja ter koeficient dolžine segmentov (Enačba 30). Enak postopek ponovimo za y vrednosti (Enačba 31).
Izračunamo x in y koordinate vektrorja hitrosti goleni (Enačba 25 in 26). Sedaj lahko izračunamo x koordinato sile, s katero deluje stegnenica na golen; ki je vsota sile stopala na golen in zmnožka mase telesa, koeficienta mase segmentov in pospeška segmenta (Enačba 32).
Enak postopek ponovimo za y vrednosti (Enačba 33).
Navor v kolenu lahko izračunamo kot vsoto zmnožka vztrajnostnega momenta in kotnega pospeška segmenta; navora sile s katero deluje stopalo na golen v x smeri; navora sile s katero deluje stopalo na golen v y smeri; navora sile stegnenice na golen v x smeri; navora sile stegnenice na golen v y smeri in navora v gležnju (Enačba 34).
Ker je bil čas trajanja posameznega koraka zelo podoben, smo lahko računali povprečje 10 korakov stabilnega kolena za vsako sličico v videoposnetku. Najprej izračunamo povprečje v času T2 (Enačba 35), nato v času T3 (Enačba 36) in tako naprej do časa Tn (Enačba 37).
Enak postopek ponovimo za računanje povprečja kota v kolenu 10 korakov nestabilnega kolena v času T2; (Enačba 35), nato v času T1 (Enačba 36) in tako naprej do časa Tn(Enačba 37).
Analiza podatkov
Izbrali smo 10 korakov za stabilno koleno in 10 korakov za nestabilno koleno. S pomočjo računalniškega programa SPSS smo izračunali vrednosti Kolmogorov-Smirnov in Shapiro-Wilk testa za posamezno merjeno mišico v posamezni podfazi koraka. Kadar sta bila oba testa statistično neznačilna (p > 0,05), smo uporabili parametrični T test neodvisnih vzorcev. Kadar je bil vsaj en test za normalno porazdelitev podatkov statistično značilen (p < 0,05) smo uporabili neparametrični Mann-Whitney U test.
Z uporabo T testa neodvisnih vzorcev oziroma Mann-Whitney U testa smo izračunali ali obstaja statistično značilna razlika med kotom v kolenu in bruto mišičnim navorom v kolenskem sklepu za vsako časovno okno.
Rezultati
Rezultati kota v kolenu med stabilnim in nestabilnim kolenom zaradi totalne rupture ACL so predstavljeni grafično na Sliki 1. V vseh časovnih oknih obstajajo statistično značilne razlike (p = 0,000).
Rezultati bruto mišičnega navora v kolenu med stabilnim in nestabilnim kolenom so predstavljeni v grafično na Sliki 2. V časovnem oknu T4 je statisično značilna razlika p = 0,039. V časovnem oknu T80 je statistično značilna razlika p=0,002. V ostalih časovnih oknih ni statistično značilnih razlik (p > 0,05).
Literatura
Bingham, J. T., Papannagari, R., van de Velde, S. K., Gross, C., Gill, T. J., Felson, D. T., Rubash, H. E. in Li, G. (2008). In vivo cartilage contact deformation in the healthy human tibiofemoral joint. Rheumatology (Oxford), 47(11), 1622-1627.
Chmielewski, T. L., Rudolph, K. S., Fitzgerald, G. K., Axe, M. J. in Snyder-Mackler L. (2001). Biomechanical evidence supporting a differential response to acute ACL injury. Clinical Biomechics (Bristol, Avon), 16(7), 586-591.
de Bruijn R. (2011). Ortopeadische Medizin: Teil 2 Untere Extremitaeten. Eersel: Satz, Druck und Bindung. de Frate, L. E, Sun, H., Gill, T. J.,
Rubash, H. E. in Li, G. (2004). In vivo tibiofemoral contact analysis using 3D MRI-based knee models. Journal of Biomechics, 37(10), 1499-1504. di Stasi, S. L. in Snyder-Mackler, L.(2012). The effects of neuromuscular training on the gait patterns of ACL-deficient men and women. Clinical Biomechanics (Bristol, Avon), 27(4), 360-365.
Draper, D. O. in Schulthies, S. S. (1995). Examiner proficiency in performing the anterior drawer and Lachman tests. The Journal of Orthopaedic and Sports Physical Therapy, 22(6), 263-266. Eastlack, M.
E., Axe, M. J. in Snyder-Mackler, L. (1999). Laxity, instability, and functional outcome after ACL injury: copers versus noncopers. Medical and Science in Sports and Exercise, 31(2), 210-215.
Fairclough, J. A., Graham, G. P. in Dent, C. M. (1990). Radiological sign of chronic anterior cruciate ligament deficiency. Injury, 21, 401-402.
Gardinier, E. S., Manal, K., Buchanan, T. S. in Snyder-Mackler, L. (2012). Gait and Neuromuscular Asymmetries after Acute ACL Rupture. Medicine and Science in Sports and Exercise. Garrett,
W. E., Speer, K. P. in Kirkendall, D. T. (2000). Principles and Practice of Orthopaedic Sports Medicine.Philadelphia: Lippincott Williams and Wilkins.
Hewett, T. E., Ford, K. R., Hoogenboom, B. J. in Myer, G. D. (2010). Understanding and preventing acl injuries: current biomechanical and epidemiologic considerations – update 2010. North American Journal of Sports and Physical Therapy, 5(4), 234-251.
Grüber, J., Wolter, D. in Lierse, W. (1986). Anterior cruciate ligament reflex (LCA reflex). Unfallchirurg, 89(12), 551-554.
Kapandji, I., A. (1970). The Physiology of the Joint. Edinburg: Churcill Livingstone.
Kaplan, Y. (2011). Identifying individuals with an anterior cruciate ligament-deficient knee as copers and noncopers: a narrative literature review. The Journal of Orthopaedics and Sports Physical Therapy, 41(10), 758-766.
Kozanek, M., Hosseini, A., Liu, F., Van de Velde, S. K., Gill, T. J., Rubash, H. E. in Li, G. (2009). Tibiofemoral kinematics and condylar motion during the stance phase of gait. Journal of Biomechanics, 42(12), 1877-1884.
Kvist, J. in Gillquist, J. (2001). Anterior positioning of tibia during motion after anterior cruciate ligament injury. Medicine and Science in Sports and Exercise, 33(7), 1063-1072.
Li, G., de Frate, L. E., Park, S. E., Gill, T. J. in Rubash, H. E. (2005A). In vivo articular cartilage contact kinematics of the knee: an investigation using dual-orthogonal fluoroscopy and magnetic resonance image-based computer models. American Journal of Sports Medicine, 33(1), 102-127.
Li, G., Park, S. E., de Frate, L. E., Schutzer, M. E., Ji, L., Gill, T. J. in Rubash, H. E. (2005B). The cartilage thickness distribution in the tibiofemoral joint and its correlation with cartilage-to-cartilage contact. Clinical Biomechanics (Bristol, Avon) 20, 736-744.
Li, G., Moses, J. M., Papannagari, R., Pathare, N. P., de Frate, L. E. in Gill, T. J. (2006). Anterior cruciate ligament deficiency alters the in vivo motion of the tibiofemoral cartilage contact points in both the anteroposterior and mediolateral directions. The Journal of Bone and Joint Surgery American volume, 88,1826-1834.
Rudolph, K. S., Eastlack, M. E., Axe, M. J. in Snyder-Mackler, L. (1998). 1998 Basmajian Student Award Paper: Movement patterns after anterior cruciate ligament injury: a comparison of patients who compensate well for the injury and those who require operative stabilization. Journal of Electromyography and Kinesiology, 8(6), 349-362.
Stauffer, R. N., Chao, E. Y. in Györy, A. N. (1977). Biomechanical gait analysis of the diseased knee joint.Clinical Orthopeadic and Related Research, 126, 246-255.
van der Harst, J. J., Gokeler, A. in Hof, A. L. (2007).Leg kinematics and kinetics in landing from a single-leg hop for distance. A comparison between dominant and non-dominant leg.Clinical Biomechanics (Bristol, Avon), 22(6), 674-680.
van de Velde, S. K., Gill, T. J. in Li, G. (2009). Evaluation of kinematics of anterior cruciate ligament-deficient knees with use of advanced imaging techniques, three-dimensional modeling techniques, and robotics. TheJournal of Bone and Joint Surgery American volume, 91(1), 108-114.
Zhang, L. Q., Shiavi, R. G., Limbird, T. J. in Minorik, J. M. (2003). Six degrees-of-freedom kinematics of ACL deficient knees during locomotion-compensatory mechanism. Gait & Posture, 17(1), 34-42.
Imate še kakšno vprašanje?
Vprašajte nas na forumu Fizioterapija in masaža.